















Robotic manipulation has long faced a fundamental challenge: how do you build control systems that can both generalize across different environments and execute precise interactions? For engineering students working on robotics, electric vehicles, or autonomous systems, this trade-off between adaptability and precision represents one of the most significant hurdles in real-world deployment.
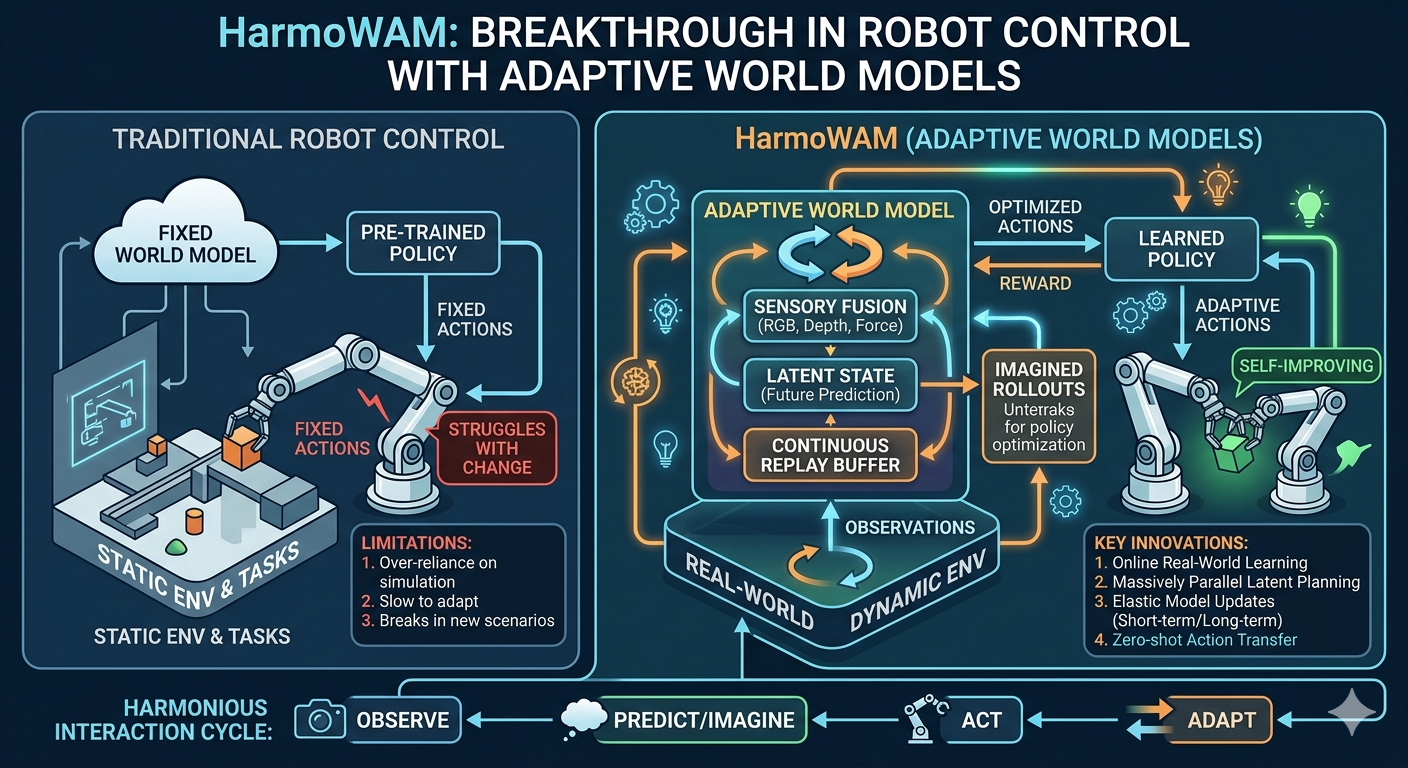
A groundbreaking paper from researchers at Peking University and collaborating institutions introduces HarmoWAM (Harmonizing Generalizable and Precise Manipulation via Adaptive World Action Models), a novel approach that successfully bridges this gap. The system achieves remarkable zero-shot generalization across unseen environments, outperforming prior state-of-the-art Vision-Language-Action (VLA) models by 33% and existing World Action Models by 29%.
This post breaks down the technical innovations behind HarmoWAM, explains how it works in engineering terms you can apply to your own projects, and connects the methodology to core concepts from your control theory and kinematics coursework.
What This Research Is About
World Action Models (WAMs) represent an emerging paradigm in robot control. Instead of directly mapping sensor inputs to motor commands, WAMs first learn to predict how the physical world evolves over time — essentially building an internal simulation of dynamics — and then use this predictive capability to generate appropriate actions.
Before HarmoWAM, two competing approaches dominated the WAM landscape:
Imagine-then-Execute models first predict a video sequence of what should happen, then work backwards (via inverse dynamics) to figure out what actions would produce that outcome. Think of it like mentally rehearsing a tennis swing before actually swinging — you visualize the motion, then your body figures out the muscle commands.
Joint Modeling approaches simultaneously learn both the video prediction and action generation as a unified task. This is more like muscle memory — the prediction and action happen together in a tightly coupled fashion.
The researchers discovered a fundamental trade-off: Imagine-then-Execute models generalize well to new situations (because they explicitly reason about world dynamics) but lack precision in fine interactions. Joint models excel at precise, temporally coherent actions but struggle when faced with scenarios outside their training distribution.
HarmoWAM solves this by harmonizing both approaches within a single architecture — getting the best of both worlds.
Methodology & How It Works
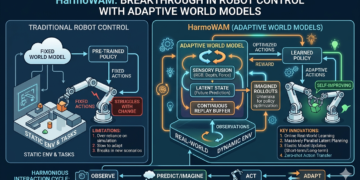
The core insight behind HarmoWAM is elegantly simple: instead of choosing between predictive and reactive control, use a world model to coordinate two specialized expert networks that handle different aspects of the task.
Architecture Overview
Picture a control system with three main components:
1. The World Model (Physical Prior Generator)
This is the physics engine in your head. It takes the current visual observation and predicts how the scene will evolve over the next few time steps. Unlike traditional dynamics models that output explicit equations, this world model learns spatio-temporal priors — latent representations that encode how objects move, interact, and change over time.
2. The Predictive Expert (Latent Dynamics Controller)
This expert uses the world model latent dynamics to iteratively generate actions through mental simulation. It analogous to Model Predictive Control (MPC) from your control theory coursework — repeatedly simulating forward, evaluating outcomes, and selecting the action sequence that optimizes a learned objective. This expert excels at transit phases: moving the robot end effector toward a target, navigating through space, or repositioning objects.
3. The Reactive Expert (Visual-Motor Reflex)
This expert directly maps predicted visual states to actions without iterative optimization. It more like a reflex arc or a well-tuned PID controller — fast, automatic, and precise. This expert handles fine manipulation: grasping small objects, inserting pegs into holes, or applying the right amount of force during contact.
The Process-Adaptive Gating Mechanism
Here where HarmoWAM gets clever. Instead of manually deciding when to use each expert, the system learns a gating function that automatically switches between them based on the current task phase.
The gating mechanism works like a state machine with learned transition conditions:
if task_phase == "transit":
expert = predictive_expert # Use MPC-like planning
elif task_phase == "interaction":
expert = reactive_expert # Use direct visual-motor mapping
else:
blend(experts) # Smooth interpolation
From a control theory perspective, you can think of this as adaptive gain scheduling — except instead of switching between fixed PID gains based on operating conditions, the system learns to switch between entirely different control policies based on the predicted task phase.
Training Strategy
The entire system trains end-to-end using behavioral cloning from demonstration data. The world model, both experts, and the gating mechanism all receive gradient updates simultaneously. This joint training ensures that:
- The world model learns representations that are useful for both experts
- The gating mechanism develops smooth, reliable switching behavior
- Both experts specialize without completely decoupling
Key Results & What They Mean
The evaluation protocol tested HarmoWAM across six real-world robotic tasks in three training-unseen environments. The variations included:
- Background changes — different table surfaces, lighting conditions, clutter
- Position variations — objects placed in novel locations relative to the robot
- Object semantics — entirely new objects not seen during training
The results speak for themselves:
| Metric | Improvement |
|---|---|
| vs. State-of-the-Art VLA Models | +33% success rate |
| vs. Prior World Action Models | +29% success rate |
| Zero-shot generalization | Strong performance across all unseen conditions |
What makes these numbers meaningful is the evaluation methodology. Unlike benchmarks that test on minor perturbations of training data, HarmoWAM was evaluated on genuinely novel combinations of environment factors — the kind of distribution shift that breaks most learned control systems.
The ablation studies confirmed that both experts contribute: removing the predictive expert degraded transit performance, while removing the reactive expert hurt fine manipulation accuracy. The gating mechanism itself proved essential — fixed switching schedules performed worse than the learned adaptive gating.
Why Engineering Students Should Care
HarmoWAM connects directly to several core topics in your engineering curriculum:
Control Theory Connections
Model Predictive Control (MPC): The predictive expert implements a learned variant of MPC. In your coursework, you study how MPC repeatedly solves finite-horizon optimal control problems. HarmoWAM innovation is learning the dynamics model and cost function from data rather than deriving them analytically.
Gain Scheduling: The adaptive gating mechanism is conceptually similar to gain scheduling in aircraft control — switching between different controller configurations based on operating conditions. Here, the operating condition is the predicted task phase.
Hybrid Systems: From a formal methods perspective, HarmoWAM is a hybrid system with continuous dynamics (within each expert) and discrete transitions (gating switches). This connects to topics in embedded systems and cyber-physical systems courses.
Kinematics & Motion Planning
The transit vs. interaction distinction maps directly to classical motion planning:
- Free-space motion (transit): Plan collision-free paths, optimize for speed/efficiency
- Contact-rich manipulation (interaction): Handle uncertainty, apply appropriate forces, manage friction
Understanding this distinction is crucial for EV drivetrain control, autonomous vehicle manipulation, and any robotic system that must both navigate and interact.
Embedded Systems Implications
Running HarmoWAM in real-time requires:
- Efficient neural network inference (both experts + world model + gating)
- Low-latency camera input processing
- Fast switching between control modes without instability
These are the same challenges you face deploying any learned control system on resource-constrained hardware — whether it an autonomous vehicle ECU, a drone flight controller, or a robotic manipulator.
Conclusion & Further Reading
HarmoWAM represents a significant advance in robot control by demonstrating that the apparent trade-off between generalization and precision isn fundamental — it architectural. By using a world model to coordinate specialized predictive and reactive experts, the system achieves both zero-shot generalization and fine manipulation accuracy.
For engineering students, the key takeaways are:
- Hybrid architectures work: Combining model-based prediction with reactive control isn new (think classical sense-plan-act vs. subsumption), but learning the coordination mechanism from data is powerful.
- World models are versatile: Beyond just prediction, learned world models can serve as shared priors that coordinate multiple downstream controllers.
- Adaptive switching matters: The gating mechanism is as important as the experts themselves — knowing when to use each approach is half the battle.
As robotics, EVs, and autonomous systems become more prevalent, understanding these architectural patterns will be essential for designing controllers that work reliably in the real world — not just in simulation or narrowly defined test environments.
Source: Feng, Q., Yu, J., Liu, J., Jia, Y., Wu, Z., Chen, H., Qian, Z., Gu, S., Jia, P., Ma, S., & Zhang, S. (2026). HarmoWAM: Harmonizing Generalizable and Precise Manipulation via Adaptive World Action Models. arXiv preprint arXiv:2605.10942. Retrieved from https://arxiv.org/pdf/2605.10942







{kind=link}